Magnetic micromachines
Micromachines are devices that are being developed to navigate human blood vessels for future biomedical applications, such as targeted drug delivery, biopsies, and stenting. These operations require mechanical motion and shape transformations of the micromachines at the small scale, so that they can interact with and manipulate small objects. We have developed a strategy to encode multiple shape transformations into micromachines incorporating nanomagnets. The magnetic configurations of these micromachines can be programmed by applying a specific sequence of magnetizing fields and, with customized micromachine designs, these magnetic configurations result in specific shape transformations in an applied magnetic field. Using this concept, we have constructed a microscale bird capable of complex behaviors, including flapping, hovering, turning and side-slipping. [1] This strategy has wide applications, not only in biomedical fields, but also for future intelligent microsystems including micro/nano robots, 3D magnetic metamaterials, photonic metamaterials and flexible electronics.
We have implemented sub-micrometre single-domain nanomagnets in microscale magneto-mechanical systems. By varying the lateral size and shape (Figure 1b), it is possible to create single-domain nanomagnets that are fully magnetized at remanence, as indicated by the square shape of the hysteresis loops in Figure 1a. We have designed an origami-like microscale bird (Figure 1c) with specific arrangements of these nanomagnet arrays on the different parts its body - head, neck, body, tail, and wings - connected by hinge springs.
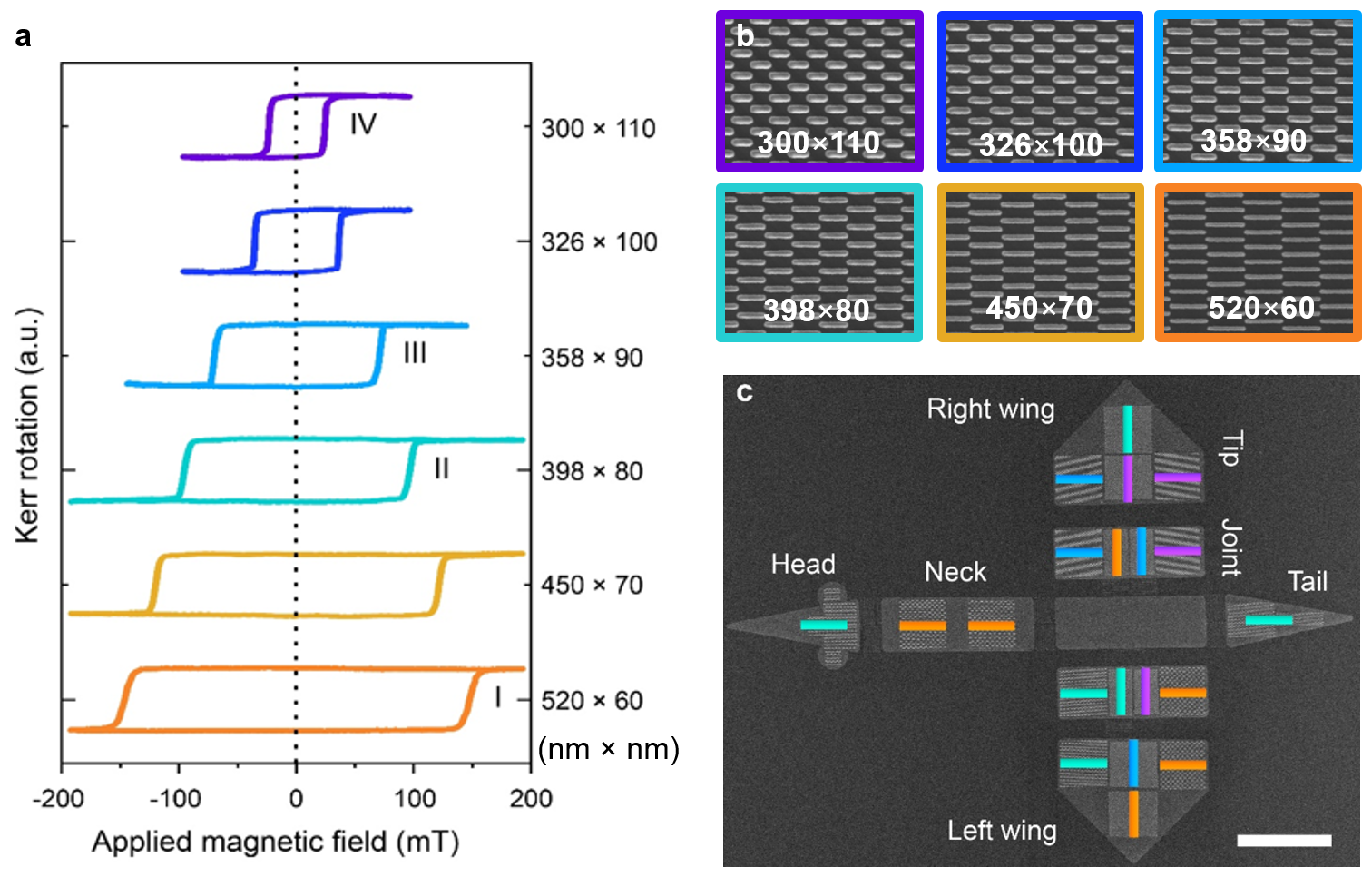
Figure 1. Nanomagnets implemented on a microscale bird. a, Magneto-optical Kerr effect hysteresis loops of single-domain nanomagnets with the same volume but with six different aspect ratios. The lateral dimensions are indicated to the right of the vertical axis in nanometres. b, SEM images of fabricated arrays of nanomagnets with lateral dimensions given in nanometres. The colour of the frames correspond to the six coloured loops in a. c, SEM image of the microscale bird. The coloured bars indicate the location of the arrays of type I–IV nanomagnets (see panel a) and the orientation of the nanomagnets. Scale bar, 15 µm.
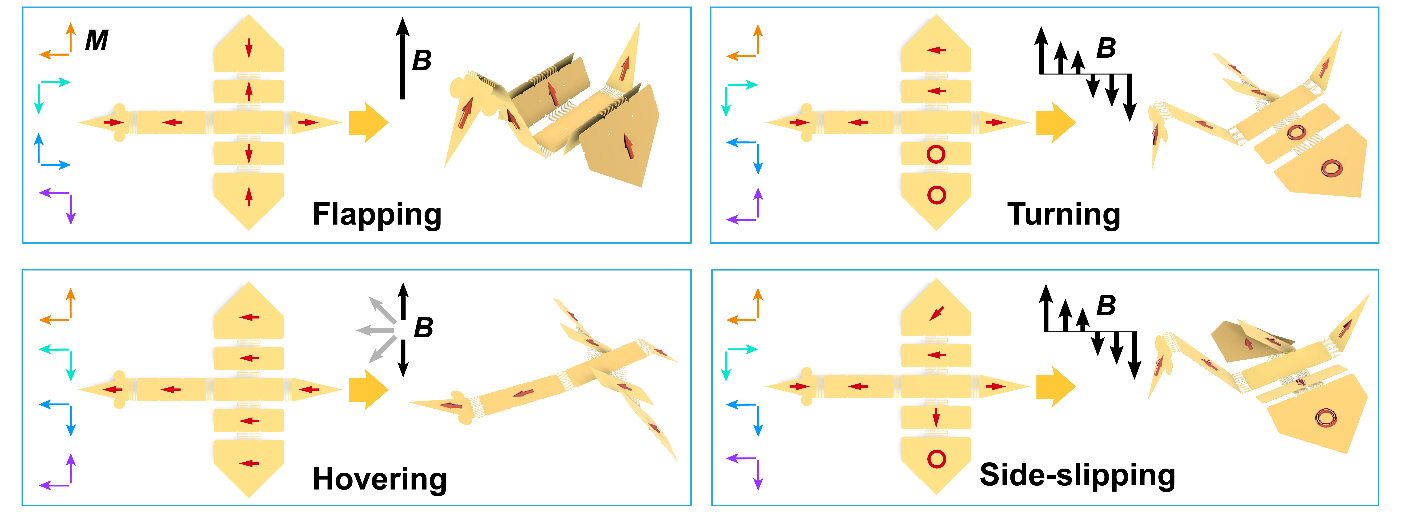
Figure 2. After encoding the bird with different magnetization configurations (left schematic in each panel), the microscale origami bird displays distinct behaviors (right schematic in each panel), such as flapping, turning, hovering and side-slipping, under a controlling magnetic field.
We encoded the nanomagnets on the microscale bird with different magnetic configurations, and we have demonstrated four distinct morphological transformations – flapping, hovering, turning and side-slipping, as illustrated in Figure 2. The transformation behaviors observed in an optical microscope and controlled by an applied magnetic field, are shown in the Video below.
The origami micro-bird demonstrates the possibility to construct micromachines that have several distinct transformations. Furthermore, our micromachines also offer a platform to construct 3D magnetic metamaterials such as a 3D realization of artificial spin ice, and photonic metamaterials where the optical properties can be adjusted by magnetically actuated transformations.
References
- Nanomagnetic encoding of shape-morphing micromachines
J. Cui, T.-Y. Huang, Z. Luo, P. Testa, H. Gu, X.-Z. Chen, B. J. Nelson and L. J. Heyderman, external page Nature 575, 164–168 (2019)